No results found
Loading...
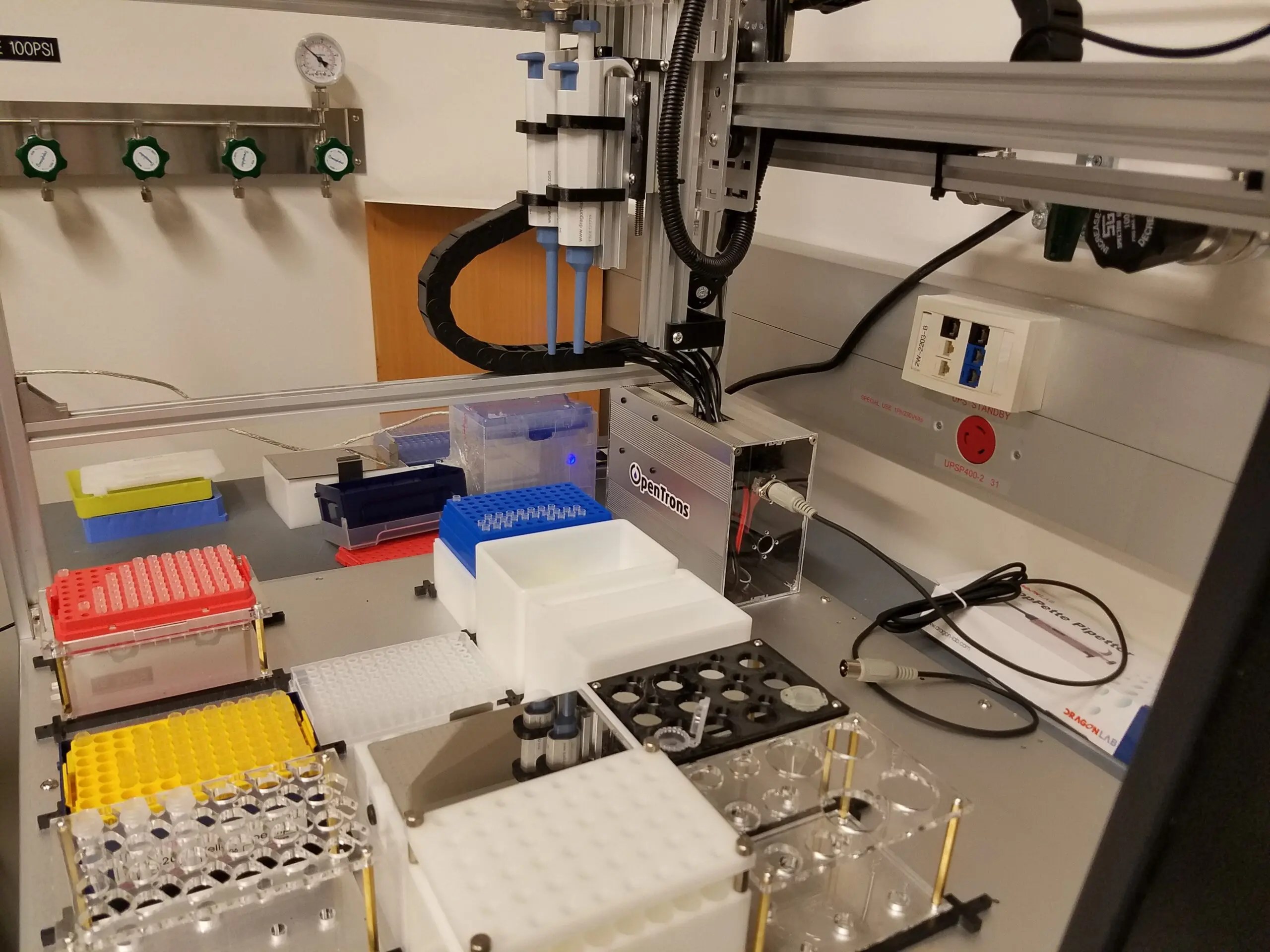
Opentrons’ Kristin Ellis and Dagney Cooke had a chance to speak with Scott Ficarro at the Dana-Farber Cancer Institute (DFCI) in Boston. Scott is a Research Scientist in the Marto Lab, Department of Cancer Biology and Blais Proteomics Center and has been using the OT-One for sample prep in mass.
(Conversation has been edited for clarity and brevity).

Kristin: So first, it would be really interesting for us to get a big picture rundown of the research that you’re doing and what role our platform is playing in that in that process.
Scott: Ok, yeah! We have in mind a lot of different experiments for the OT-One related to sample preparation for mass spectrometry experiments. There’s a whole multitude of possibilities ranging from digestion to phosphopeptide enrichment.
Kristin: And that’s what you’re hoping to use the MagDeck module for?
Scott: Yeah, so that would be with the Qiagen beads. We aim to do iron-NTA enrichment of phosphopeptides, for example. We also have some magnetic beads for peptide desalting. A lot of times you’re doing digestions in buffers that have a high salt content and you need to get rid of the salt to do additional chemical reactions. Or, if you want to do ion exchange chromatography, you have to get rid of that initial salt. So it’s a very common task, and right now it’s all done manually. We do have a vacuum manifold but still it’s all hand pipetting, and if we can automate that with a magnetic bead format it would save us a lot of work.
Also, when we do MALDI analyses, this involves desalting with a ZipTip, and then you have to spot it out on a plate. It’s not difficult in itself but if you’re doing 10 samples you start to get what almost feels like carpal tunnel syndrome setting in! To be able to process large sample sets with the robot would be greatly beneficial.
We are also excited to think about applications in drug discovery efforts. For example we are collaborating with Nathaniel Gray’s lab to develop and biochemically characterize novel covalent kinase inhibitors. We’d like to develop a kinetic assay with the robot – essentially set up the protein reaction with the inhibitor and have the robot take out aliquots at various time points and spot them on a MALDI plate – this would be really cool!
So I’ve got a lot of ideas for how to leverage the Opentrons platform toward many different projects. As we get our feet wet, I’m sure we’ll have ideas for extending it further.
Kristin: So it sounds like a lot of your research using Opentrons is focusing on sample preparation for mass spec. Sorry if this is a silly question – but what’s the scientific or the technical importance of that? Besides the obvious of saving you from carpal tunnel and manual labor?
Scott: Well, consistent sample prep is key to getting reproducible results, and it takes a lot of time to do it by hand. We are engaged in our own projects as well as a number of different collaborations across the Institute, and there is only so much time to go around. Having flexible automated sample prep systems will enable us to do more work and do it reproducibly. For example, the Opentrons platform should give us a much higher throughput for kinase inhibitor binding assays.
Kristin: How would that work?
Scott: Since the robot can spot very fast, you can sample reactions with nice time resolution. And you could do this for many compounds in parallel. This type of information is very useful in many of our projects.
Dagney: Is that what you’re mainly using the MALDI plates for?

Scott: That would be one application. But there are many others. For example, we would like to use it for routine intact protein analysis and also to spot out digests to confirm protein ID by MS/MS.
Dagney: So as sample preparation improves, you get cleaner results and get to do a lot more with them.
Scott: : Yeah, you know, you can spend more time thinking about the science and less time at the bench.
Kristin: And sharing! Our dream is to have you guys and Stanford doing the same thing on opposite sides of the country and developing these processes.
Scott: Yeah, it makes everybody more productive. It would be great to see how everyone develops! I’m very excited about this whole open-source revolution.
Dagney: So how much open-source equipment do academic settings usually have?
Scott: From what I’ve seen very little – but that’s just because I think the trend toward open-source equipment is just starting to take off. I’ve heard of a few labs having 3D printers, and many labs interested in your robot platforms, but in all the labs I’ve been in I really haven’t seen any open-source equipment. However, as more exciting open-source solutions like yours become available I think they will be quickly adopted due to their many advantages. For example, open-source options will help to mitigate the ever increasing costs associated with service calls for maintenance of proprietary instrumentation.
Kristin: And how do you think that having access to more open source equipment is going to help you better execute your research?
Scott: A lot of times, as a researcher, you’re thinking creatively about how to get a problem solved. Unfortunately the existing hard-wired closed-source systems don’t let you do exactly what you want to do. You either need to change the software or a little bit of the hardware to get the job done. With closed systems, those things are very hard – or impossible – to do.
As an example, we have several proprietary robotic platforms in the lab, which perform their intended functions well, but are not particularly amenable to modification beyond a limited set of operations. Open-source platforms like yours will enable rapid prototyping of custom solutions. For example, I don’t think you envisioned your robot as a MALDI spotter; but now that we’ve developed it, I believe the OT-One will work quite well to spot samples for MALDI analysis.

Dagney: That’s great!
Scott: Yeah! So you know, if we want to do something outside the box we can. With your Python API, I mean… really the sky’s the limit in terms of customization you could do. As far as I know that would be impossible to do on any other commercially available system just from a software standpoint. You can’t hack into those things, they’re all pre-compiled.
Kristin: Yeah, most robots offer a single avenue of use, basically.
Scott: Yeah. Although commercial vendors try to make their software flexible you often encounter limitations – it’s really frustrating sometimes because you can see a couple minor software changes – changes that would take somebody that knew how to code just a few minutes – could enable certain workflows or applications. But it is very difficult to get them to do that.
I think they do have good intentions but they can’t see all the use cases out there and they just don’t have the manpower to respond to feedback in real time. But with you guys on Slack it’s great. You know, I’ll post something there and typically way sooner than expected I get a reply with suggestions. You guys are great to work with! I wish it was like that all the way around!